Нейроуправление
Нейроуправление (англ. Neurocontrol) — частный случай интеллектуального управления, использующий искусственные нейронные сети для решения задач управления динамическими объектами. Нейроуправление находится на стыке таких дисциплин, как искусственный интеллект, нейрофизиология, теория автоматического управления, робототехника. Нейронные сети обладают рядом уникальных свойств, которые делают их мощным инструментом для создания систем управления: способностью к обучению на примерах и обобщению данных, способностью адаптироваться к изменению свойств объекта управления и внешней среды, пригодностью для синтеза нелинейных регуляторов, высокой устойчивость к повреждениям своих элементов в силу изначально заложенного в нейросетевую архитектуру параллелизма. Термин «нейроуправление», впервые был использован одним из авторов метода обратного распространения ошибки Полом Дж. Вербосом в 1976 году[1][2]. Известны многочисленные примеры практического применения нейронных сетей для решения задач управление самолетом[3][4], вертолетом[5], автомобилем-роботом[6], скоростью вращения вала двигателя[7], гибридным двигателем автомобиля[8], электропечью[9], турбогенератором[10], сварочным аппаратом[11], пневмоцилиндром[12], системы управления вооружением легкобронированных машин[13], моделью перевернутого маятника[14].
Содержание
- 1 Методы нейроуправления
- 1.1 Подражающее нейроуправление
- 1.2 Обобщенное инверсное нейроуправление
- 1.3 Специализированное инверсное нейроуправление
- 1.4 Метод обратного пропуска ошибки через прямой нейроэмулятор
- 1.5 Метод нейроуправления с эталонной моделью
- 1.6 Метод нейросетевой фильтрации внешних возмущений
- 1.7 Прогнозирующее модельное нейроуправление
- 1.8 Адаптивные критики
- 1.9 Гибридное нейро-ПИД управление
- 1.10 Гибридное параллельное нейроуправление
- 2 Примечания
- 3 Ссылки
- 4 Литература
Методы нейроуправления
 По способу использования нейронных сетей методы нейроуправления делятся на прямые методы и непрямые методы. В прямых методах нейронная сеть обучается непосредственно генерировать управляющие воздействия на объект, в непрямых методах нейронная сеть обучается выполнять вспомогательные функции: идентификация объекта управления, подавление шума, оперативная настройка коэффициентов ПИД-контроллера. В зависимости от числа нейросетей, составляющих нейроконтроллер, системы нейроуправления делятся на одномодульные и многомодульные. Системы нейроуправления, которые применяются совместно с традиционными регуляторами, называются гибридными.
По способу использования нейронных сетей методы нейроуправления делятся на прямые методы и непрямые методы. В прямых методах нейронная сеть обучается непосредственно генерировать управляющие воздействия на объект, в непрямых методах нейронная сеть обучается выполнять вспомогательные функции: идентификация объекта управления, подавление шума, оперативная настройка коэффициентов ПИД-контроллера. В зависимости от числа нейросетей, составляющих нейроконтроллер, системы нейроуправления делятся на одномодульные и многомодульные. Системы нейроуправления, которые применяются совместно с традиционными регуляторами, называются гибридными.
В задачах нейроуправления для представления объекта управления используют модель черного ящика, в котором наблюдаемыми являются текущие значения входа и выхода. Состояние объекта считается недоступным для внешнего наблюдения, хотя размерность вектора состояний обычно считается фиксированной. Динамику поведения объекта управления можно представить в дискретном виде:
- <math> \begin{matrix}S(k+1)=\Phi(S(k), u(k))) \\ y(k+1)=\Psi(S(k)) \end{matrix} </math>
где: <math>S(k)\in\mathbb{R}^N</math> — состояние объекта управления порядка <math>N</math> на такте <math>k</math>; <math>u(k)\in\mathbb{R}^P</math> — значение <math>P</math>-мерного вектора управления на такте <math>k</math>, <math>y(k+1)\in\mathbb{R}^V</math> — значение <math>V</math>-мерного выхода объекта управления на такте <math>k+1</math>.
Для оценки текущего состояния объекта управления <math>S(k)</math> может быть использована модель NARX, состоящая из прошлых положений объекта <math>y</math> и задержанных сигналов управления <math>u</math>:
- <math>
S(k) = [y(k)~y(k-1)~y(k-2)~\ldots~y(k-N)~u(k-1)~u(k-2)~\ldots~u(k-Q)]^T </math>
Вектор оценки состояния <math>S</math> может быть также представлен без использования задержанных сигналов:
- <math>
S(k) = [y(k)~y(k-1)~y(k-2)~\ldots~y(k-N)]^T </math>
Также возможно представить состояние объекта как мгновенный снимок его фазовой траектории:
- <math>
S(k) = [y(k)~y(k)'~\ldots~y(k)^{(N)}]^T </math>
Подражающее нейроуправление

Подражающее нейроуправление[15][16][17] (Neurocontrol learning based on mimic, Controller Modeling, Supervised Learning Using an Existing Controller) охватывает системы нейроуправления, в которых нейроконтроллер обучается на примерах динамики обычного контроллера по обратной связи, построенного, например, на основе обычной ПИД-схемы управления. После обучения нейронная сеть в точности воспроизводит функции исходного контроллера. В качестве примеров динамики контроллера может быть использована запись поведения человека-оператора. Обычный контроллер по обратной связи (или человек-оператор) управляет объектом управления в штатном режиме. Значения величин на входе и выходе контролера протоколируются, и на основе протокола формируется обучающая выборка <math>U = \{P_i, T_i\}_{i=1}^M </math> для нейронной сети, содержащая <math>M</math> пар значений входа <math>P_i</math> и ожидаемых реакций <math>T_i</math> нейросети:
- <math> \begin{matrix}P_i = [r(i+1)~S(i)]^T \\ T_i = u(i) \end{matrix} </math>
После обучения с помощью, например, метода обратного распространения ошибки, нейронная сеть подключается вместо исходного контроллера. Полученный нейроконтроллер может заменить человека в управлении устройством, а также быть более выгодным экономически, чем исходный контроллер.
Обобщенное инверсное нейроуправление
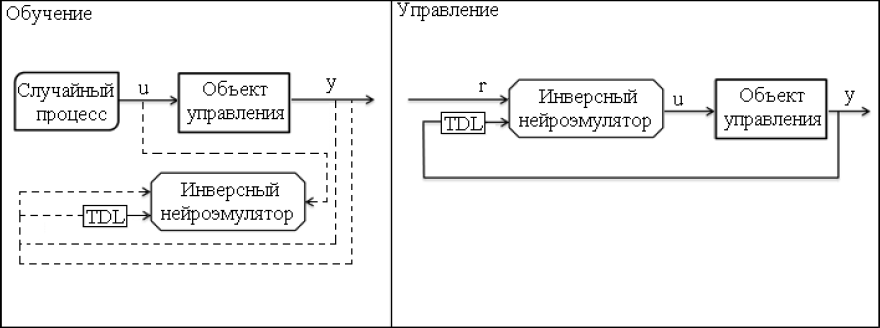
В схеме обобщенного инверсного нейроуправления (Generalized Inverse Neurocontrol, Direct Inverse Neurocontrol, Adaptive Inverse Control)[18][19] в качестве контроллера используется нейронная модель инверсной динамики объекта управления, называемая инверсный нейроэмулятор. Инверсный нейроэмулятор представляет собой нейронную сеть, обученную в режиме офлайн имитировать обратную динамику объекта управления на основе записанных траекторий поведения динамического объекта. Для получения таких траекторий, на объект управления в качестве управляющего сигнала подают некоторый случайный процесс. Значения управляющих сигналов и ответных реакций объекта протоколируют и на этой основе формируют обучающую выборку <math>U = \{P_i, T_i\}_{i=1}^M </math>:
- <math> \begin{matrix}P_i = [y(i)~S(i-1)]^T \\ T_i = u(i) \end{matrix} </math>
В ходе обучения, нейронная сеть должна уловить и запомнить зависимость значений управляющего сигнала <math>u(k-1)</math> от последуюшего значения реакции объекта управления <math>y(k)</math>, находящегося перед этим в состоянии <math>S(k-1)</math>. При управлении объектом, инверсный нейроэмулятор подключается как контроллер, получая при этом на вход <math>x(k)</math> значения уставки <math>r(k+1)</math> и состояния объекта управления <math>S(k)</math>, поступающего по каналу обратной связи:
- <math>x(k)=[r(k+1)~S(k)]^T</math>
Предполагается, что сформированная при обучении инверсная модель объекта управления является адекватной, следовательно сигнал управления, выдаваемый нейронной сетью, обеспечит переход объекта в положение, заданное уставкой.
Специализированное инверсное нейроуправление
Специализированное инверсное нейроуправление (Specialised Inverse Neurocontrol)[18][19] использует методику обучения нейроконтроллера в режиме онлайн, используя текущую ошибку отклонения положения объекта от уставки <math>e(k)=r(k)-y(k)</math>. Схема подключения нейроконтроллера такая же, как в методе обобщенного инверсного нейроуправления. На вход сети подается вектор <math>x(k)</math>:
- <math>x(k)=[r(k+1)~S(k)]^T</math>
Нейронная сеть генерирует управляющий вектор <math>u(k)</math>, который переводит объект управления в положение <math>y(k+1)</math>. Далее вычисляется текущая ошибка работы нейроконтроллера
- <math>e(k)=r(k+1)-y(k+1)</math>
Вычисляется градиент изменения весов
- <math>\Delta w = e(k) \frac{\partial y(k+1)}{\partial u(k)} \frac{\partial u(k)}{\partial w(k)}</math>
Затем производится коррекция весов нейроконтроллера по методу наискорейшего спуска или каким-либо другим градиентным методом.
Производная <math>\frac{\partial y(k+1)}{\partial u(k)}</math> представляет собой якобиан объекта управления, значение которого задается аналитически по заданной математической модели объекта управления. Однако, на практике, для получения приемлемого качества управления часто бывает достаточно вычислить лишь знак якобиана. Итерации коррекции значений коэффициентов продолжаются до достижения приемлемого качества управления.
Метод обратного пропуска ошибки через прямой нейроэмулятор

Метод обратного пропуска ошибки через прямой нейроэмулятор (Backpropagation Through Time, Model Reference Adaptive Control, Internal Model Control)[8][20][21][22] основан на идее применения тандема из двух нейронных сетей, одна из которых выполняет функцию контроллера, а вторая — модели объекта управления, которая носит название прямой нейроэмулятор. Прямой нейроэмулятор служит для вычисления градиента ошибки нейроконтроллера в процессе его обучения и далее не используется. Можно сказать, что нейроконтроллер и нейроэмулятор представляют собой единую нейросеть, при этом, при обучении нейроконтроллера веса прямого нейроэмулятора «замораживаются». Прямой нейроэмулятор обучается первым. Для этого, на вход объекта управления подается случайный управляющий сигнал <math>u</math>, изменяющий положение объекта управления <math>y</math>, и формируется обучающая выборка <math>U = \{P_i, T_i\}_{i=1}^M </math>:
- <math>\begin{matrix} P_i = [u(i)~S(i-1)]^T \\ T_i = y(i) \end{matrix}</math>
Обучение прямого нейроэмулятора выполняется в режиме офлайн. Прямой нейроэмулятор считается обученным, если при одинаковых значениях на входах нейроэмулятора и реального объекта, отличие между значениями их выходов становится незначительным. После завершения обучения прямого нейроэмулятора, проводится обучение нейроконтроллера. Обучение выполняется в режиме онлайн по такой же схеме, как и в случае специализированного инверсного нейроуправления. Сначала (на такте <math>k</math>) на вход нейроконтроллера поступает желаемое положение объекта управления для следующего такта <math>r(k+1)</math>. Нейроконтроллер генерирует сигнал управления <math>u(k)</math>, который поступает на входы объекта управления и нейроэмулятора. В результате, управляемый объект переходит в положение <math>y(k+1)</math>, а нейроэмулятор генерирует реакцию <math>\hat{y}(k+1)</math>. Далее вычисляется ошибка управления <math>e(k)=r(k+1)-y(k+1)</math> и пропускается в обратном направлении по правилу обратного распространения. Весовые коэффициенты связей нейроэмулятора при этом не корректируются. Механизм обратного прохождения ошибки через прямой нейроэмулятор реализует локальную инверсную модель в текущей точке пространства состояний объекта управления. Пройдя через нейроэмулятор, ошибка далее распространяется через нейроконтроллер, но теперь её прохождение сопровождается коррекцией весовых коэффициентов нейроконтроллера. Прямой нейроэмулятор при этом выполняет функции дополнительных слоев нейроной сети нейроконтроллера, в которых веса связей не корректируются.
Метод нейроуправления с эталонной моделью

Метод нейроуправления с эталонной моделью (Model Reference Adaptive Control, Neural Adaptive Control)[22][23][24] — вариант нейроуправления по методу обратного пропуска ошибки через прямой нейроэмулятор, с дополнительно внедренной в схему эталонной моделью (Reference Model) динамической системы, имитировать поведение которой обучается нейроконтроллер. Это делается в целях повышения качества переходного процесса: в случае, когда переход объекта в целевое положение за один такт невозможен, траектория движения и время осуществления переходного процесса становятся плохо прогнозируемыми величинами и могут привести к неустойчивости переходного процесса. Для уменьшения этой неопределенности, вводится эталонная модель, представляющая собой, как правило, устойчивую линейную динамическую систему первого или второго порядка. В ходе обучения, эталонная модель на такте <math>k</math> получает на вход уставку <math>r(k+1)</math> и генерирует опорную траекторию <math>y'(k+1)</math>, которая сравнивается с положением объекта управления <math>y(k+1)</math> с целью получить ошибку управления <math>e(k+1)</math>, минимизировать которую обучается нейроконтроллер.
Метод нейросетевой фильтрации внешних возмущений

Метод нейросетевой фильтрации внешних возмущений (Adaptive Inverse Control based on Linear and Nonlinear Adaptive Filtering, Internal Model Control)[25] служит для улучшения качества работы контроллера в цепи управления. Изначально, эта схема была предложена Б. Уидроу для использования совместно с нейроконтроллерами, обученными по методу обобщенного инверсного нейроуправления[26]. В более поздней работе[27] им были применены нейроконтроллеры, обученные по методу обратного распространения ошибки через прямой нейроэмулятор. В принципе, нейросетевую фильтрацию ошибок можно использовать для повышения качества работы контроллера любого типа, не обязательно нейросетевого. В этой схеме используется две предварительно обученных нейронных сети: инверсный нейроэмулятор, обученный так же, как это делается в методе обобщенного инверсного нейроуправления и прямой нейроэмулятор, обученный так же, как это делается в методе обратного распространения ошибки через прямой нейроэмулятор. Пусть на объект управления поступает управляющий сигнал <math>\hat{u}_F(k)</math>, явившийся результатом суммирования сигнала контроллера <math>\hat{u}(k)</math> и корректирующего сигнала системы фильтрации внешних возмущений <math>\hat{u}_C(k)</math>, вычисленного на предыдущем такте. Сигнал направляется на прямой нейроэмулятор объекта управления, а реакция прямого нейроэмулятора сравнивается с реальным положением системы <math>y(k)</math>. Разница этих величин <math>e(k)</math> трактуется как нежелательное отклонение системы, вызванное внешним возмущением. Для подавления нежелательного эффекта, сигнал поступает на инверсный нейроэмулятор, который рассчитывает корректирующий сигнал <math>\hat{u}_C(k+1)</math> для корректировки управляющего сигнала нейроконтроллера <math>\hat{u}(k+1)</math> на следующем такте. Для использования этого метода, объект управления должен обладать обращаемой динамикой, а также необходимо иметь адекватную математическую или имитационную модель объекта управления для обучения прямого и инверсного нейроэмуляторов.
Прогнозирующее модельное нейроуправление

Прогнозирующее модельное нейроуправление (NN Predictive Control, Model Predictive Control, Neural Generalized Predictive Control)[28][29] минимизирует функционал стоимости интегральной ошибки <math>Q(k)</math>, прогнозируемой на <math>L=max(L_2, L_3)</math>, <math>0\le L_1\le L_2</math> тактов вперед:
<math>Q(k) = \sum_{i=L_1}^{L_2}e(k+i)^2+\rho \sum_{i=0}^{L_3}(u(k+i)-u(k+i-1))^2.</math>
Здесь <math>e(k)</math> — ошибка выхода системы, <math>\rho</math> — вклад изменения управляющего сигнала в общий функционал стоимости <math>Q(k)</math>. Для прогнозирования будущего поведения системы и вычисления ошибок используется прямой нейроэмулятор, обученный так же, как в методе обратного распространения ошибки через прямой нейроэмулятор. Примечательность рассматриваемого метода состоит в том, что в нем отсутствует обучаемый нейроконтроллер. Его место занимает оптимизационный модуль, работающий в режиме реального времени, в котором может быть использован, например, симплекс-метод[30] или квази-Ньютоновский алгоритм[31].
Оптимизационный модуль получает на такте целевую траекторию на <math>L</math> тактов вперед, а если её нет, то <math>L</math> раз дублирует значение текущей уставки <math>r(k+1)</math> и использует это в качестве целевой траектории. Далее, для выбора оптимального управляющего воздействия, вычисления происходят во внутреннем цикле системы нейроуправления (его итерации обозначаются как <math>j</math>). За время одного такта управления оптимизационный модуль подает на вход нейроэмулятора серию различных воздействий <math>\hat{u}(k+t,j)</math>, где <math>t</math> — глубина прогнозирования, <math>0\le t \le L-1</math> , получает различные варианты поведения системы, вычисляет для них функцию стоимости <math>Q(k)</math> и определяет наилучшую стратегию управления <math>ST=\{\hat{u}(k, j_1)~\hat{u}(k, j_2)~\ldots~~\hat{u}(k, j_L)\}</math>. В итоге, на объект подается управляющий сигнал <math>\hat{u}(k, j_1)</math>. На следующем такте стратегия <math>ST</math> пересчитывается заново.
Адаптивные критики

Методы нейроуправления на основе адаптивной критики (Adaptive Critics), которые также известны как приближенное динамическое программирование (Approximated Dynamic Programming, ADP), в последние годы весьма популярны[32][33][34][35]. Системы адаптивной критики выбирают управляющий сигнал на основе минимизации функционала оценок ошибок будущего с бесконечным горизонтом:
- <math>
J(k) = \sum_{i=0}^{\infty}\gamma^ie(k+i)^2. </math>
Здесь <math>\gamma</math> — коэффициент забывания, <math>0<\gamma\le1</math>, <math>e(k)=r(k+1)-y(k+1)</math> — отклонение траектории объекта управления от уставки, вычисляемое на каждом такте работы системы. Система включает два нейронных модуля: нейроконтроллер и модуль критики (критик). Модуль критики выполняет аппроксимацию значений функционала стоимости <math>J(k)</math>, нейроконтроллер обучают минимизировать функционал стоимости <math>J(k)</math>.
В режиме управления объектом, на вход нейроконтроллера поступает вектор <math>x(k) = [r(k+1)~S(k)]^T</math>, вызывающий появление на его выходе сигнала управления <math>u(k)</math>, в результате чего объект управления переходит в положение <math>y(k+1)</math>. Далее производится вычисление значения текущей ошибки управления <math>e(k)</math>. Модуль критики, получая на входе вектор <math>z(k)=[r(k+1)~u(k)~S(k)]^T</math>, производит оценку функции стоимости <math>J(k)</math>. На следующем такте процесс повторяется: вычисляются новые значения <math>e(k+1)</math> и <math>J(k+1)</math>. Обучение системы нейроуправления происходит в режиме онлайн и состоит из двух этапов: обучения модуля критики и обучения нейроконтроллера. Сначала, рассчитывается ошибка временной разности <math>\delta w(k) = e(k) + \gamma J(k+1) - J(k)</math>. Затем по методу наискорейшего спуска выполняется коррекция веса связей для модуля критики <math>w_{critic}</math>:
- <math>\Delta w_{critic}(k) = -{\alpha}_1 \delta (k) \frac{\partial J(k)}{\partial w_{critic}(k)}</math>
Значение градиента <math>\frac{\partial J(k)}{\partial w_{critic}(k)}</math> рассчитывается по методу обратного распространения ошибки. Коррекция веса связей нейроконтроллера <math>\Delta w_{control}</math> производится аналогично:
<math> \Delta w_{control}(k) = -{\alpha}_2 \frac{\partial J(k)}{\partial u(k)} \frac{\partial u(k)}{ \partial w_{control}(k)} </math>
Значение производной <math>\frac{\partial J(k)}{\partial u(k)}</math> находят путём обратного распространения величины через модуль критики, а значение градиента <math>\frac{\partial u(k)}{ \partial w_{control}(k)}</math> — путём обратного распространения ошибки через модуль контроллера. Коррекция весов продолжается, пока система не достигнет требуемого уровня качества управления. Таким образом, на каждом шаге улучшается закон управления, путём обучения нейроконтроллера (итерация по стратегиям, Policy Iteration), а также повышается способность системы оценивать ситуацию, путём обучения критика (итерация по значениям, Value Iteration). Конкретная схема построения системы адаптивной критики может отличаться от вышеописанной, носящей название эвристическое динамическое программирование (Heuristic Dynamic Programming, HDP). В методе дуального эвристического программирования (Dual Heuristic Programming, DHP) модуль критики вычисляет производную функционала глобальной стоимости <math>\frac{\partial J}{\partial t}</math>, а в методе глобального дуального эвритического программирования (Global Dual Heuristic Programming, GHDP) критиком вычисляются как сам функционал функции стоимости <math>J</math>, так и его производная <math>\frac{\partial J}{\partial t}</math>. Известны модификации метода, в которых модуль критики принимает решения исключительно на основе управляющего сигнала. Их англоязычные аббревиатуры имеют приставку AD (Action Dependent): ADHDP, ADDHP, ADGDHP. В некоторых версиях адаптивной критики модуль критики состоит из двух частей: собственно, модуля критики и прямого нейроэмулятора. Последний выдает предсказания поведение объекта управления, на основе которых критик формирует оценку функции стоимости <math>J</math>. Такие версии носят название основанные на модели (model based).
Гибридное нейро-ПИД управление

Гибридное нейро-ПИД управление (NNPID Auto-tuning, Neuromorphic PID Self-tuning)[36][37] позволяет осуществлять самонастройку ПИД-регулятора в режиме онлайн путём использованием нейронных сетей. Настройка ПИД-регулятора выполняется в режиме онлайн, по текущей ошибке управления <math>e(k)=r(k+1)-y(k+1)</math>. На такте <math>k</math> нейронная сеть получает уставку <math>r(k+1)</math> и генерирует коэффициенты управления ПИД-контроллера <math>K_1</math> (пропорциональный), <math>K_2</math> (интегральный), <math>K_3</math> (дифференциальный), которые поступают на ПИД-контроллер вместе со значением текущей ошибки обратной связи <math>e(k)</math>. В ходе работы, ПИД-контроллер рассчитывает текущий управляющий сигнал <math>u(k)</math> по формуле:
- <math>
u(k) = u(k-1) + K_1(k)(e(k)-e(k-1)) + K_2(k)e(k) + K_3(k)(e(k) - 2e(k-1) + e(k-2)) </math> применяемой для дискретных ПИД-контроллеров и подает его на объект управления.
Обучение нейросети происходит в режиме реального времени по ошибке обратной связи, методом наискорейшего спуска.
- <math>
\Delta w(k) = -\alpha e(k) \frac{\partial y(k+1)}{\partial u(k)} \frac{\partial u(k)}{\partial K(k)} \frac{\partial K(k)}{\partial w(k)} </math>
Здесь <math>K(k)=[K_1(k)~K_2(k)~K_3(k)]^T</math> — вектор выходов нейронной сети, поступающий на ПИД-контроллер.
- <math>
\frac{\partial u(k)}{\partial K_i(k)} = \Bigg \{ \begin{matrix} e(k) - e(k-1) & for~i = 1; \\ e(k) & for~i = 2; \\ e(k) - 2e(k-1) + e(k-2) & for~i = 3. \end{matrix} </math>
Градиенты <math>\frac{\partial K_i(k)}{\partial w(k)}</math> вычисляют методом обратного распространения ошибки. Якобиан объекта управления <math>\frac{\partial y(k+1)}{\partial u(k)}</math> ли его знак находится аналитически, на основе математической модели объекта управления.
Гибридное параллельное нейроуправление

Методы гибридного параллельного нейроуправления (Parallel Neurocontrol, Stable Direct Adaptive Control, Additive Feedforward Control)[25][28] предусматривают параллельное использование нейроконтроллеров и обычных контроллеров для управления динамическими объектами. При этом нейроконтроллер и обычный контроллер, в роли которого выступает, например, ПИД-контроллер, получают одинаковые значения уставки. Возможны следующие варианты совместного подключения обычного контроллера и нейроконтроллера:
- к объекту управления подключается обычный контроллер, после чего нейроконтроллер обучается управлять уже замкнутой обычным контроллером системой. После обучения нейроконтроллера, он подключается к системе, а управляющие сигналы обоих контроллеров суммируются;
- нейроконтроллер учится управлять объектом управления, после обучения начинает функционировать в штатном режиме. Далее, для управления замкнутой нейроконтроллером системой настраивается обычный контроллер. После настройки обычного контроллера, он подключается к системе, управляющий сигнал обоих контроллеров суммируется;
- области действия обычного контроллера и нейроконтроллера разграничиваются. Например, в пространстве состояний объекта управления для нейроконтроллера выделяется отдельная область <math>LS</math>:
- <math>LS=[(y_1-d_1;y_1+d_1)~\ldots~(y_N-d_N;y_N+d_N)]^T</math>
При этом, обычный контроллер рассчитывается на управление объектом вне этой области пространства состояния. При параллельной работе обоих контроллеров, управляющий сигнал поступает на объект либо от нейроконтроллера, если текущее состояние системы находится в пределах области <math>LS</math>, либо, в противном случае, от обычного контроллера. Гибридное параллельное нейроуправление представляет компромиссное решение для внедрения нейроуправления в промышленность и перехода от обычных контроллеров к нейросетевым.
Напишите отзыв о статье "Нейроуправление"
Примечания
- ↑ [users.kpi.kharkov.ua/Mahotilo/Docs/Book1/book1.html Вороновский Г. К., Генетические алгоритмы, искусственные нейронные сети, 1997]
- ↑ [ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=118583 Werbos, P.J. Backpropagation and neurocontrol: a review and prospectus // International Joint Conference on Neural Networks, Vol. 1. — P. 209—216. — Washington, DC , USA, 18-22 Jun 1989]
- ↑ [citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.98.2481&rep=rep1&type=pdf Gundy-Burlet K., Krishnakumar K., Limes G., Bryant D. Augmentation of an Intelligent Flight Control System for a Simulated C-17 Aircraft // J. of Aerospace Computing, Information, and Communication. — 2004. — Vol. 1, N 12. — P. 526—542]
- ↑ [library.mephi.ru/data/scientific-sessions/2010/neiroinform/ch2/5-1-1.doc Кондратьев А. И., Тюменцев Ю. В. Нейросетевое адаптивное отказоустойчивое управление движением маневренного самолета // XII Всероссийская научно-техническая конференция «Нейроинформатика — 2010»: Часть 2. — М.: НИЯУ МИФИ, 2010. — С. 262—273.]
- ↑ [www.iai.dn.ua/public/JournalAI_2000_3/2/290-298.pdf Никифорова Л. Н., Петросян Э. А., Якеменко Г. В. Нейрокомпьютеры в управлении вертолетами // Искусственный интеллект. — 2000. — № 3. — С. 290—298]
- ↑ [citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.2.6654&rep=rep1&type=pdf D. Gu and H. Hu. Neural Predictive Control for a Car-like Mobile Robot // International Journal of Robotics and Autonomous Systems, Vol. 39, No. 2-3, May, 2002]
- ↑ [Терехов В. А., Ефимов Д. В., Тюкин И. Ю. Нейросетевые системы управления: Учеб. пособие для вузов. — М.: Высш. школа 2002. — 183 с.]
- ↑ 1 2 [home.comcast.net/~dvp/ProkhorovNN07web.pdf Danil V. Prokhorov. Toyota Prius HEV Neurocontrol and Diagnostics // Neural Networks. — 2008. — No. 21. — P. 458—465]
- ↑ [cee.uma.pt/morgado/Down/DIAS401.PDF Dias F.M., Mota A.M. Comparison between Different Control Strategies using Neural Networks // 9th Mediterranean Conference on Control and Automation. — Dubrovnik, Croatia, 2001]
- ↑ [web.mst.edu/~ganeshv/Implementation_of_Adaptive_Critic_Based_Neurocontrollers_for_Turbogenerators_in_a_Multimachine_Power_System.pdf Venayagamoorthy G.K., Harley R.G., Wunsch D.C. Implementation of Adaptive Critic-based Neurocontrollers for Turbogenerators in a Multimachine Power System, IEEE Transactions on Neural Networks. — 2003. — Vol. 14, Issue 5. — P. 1047—1064.]
- ↑ [www.sciencedirect.com/science/article/pii/S0736584506000378 D’Emilia G., Marrab A., Natalea E. Use of neural networks for quick and accurate auto-tuning of PID controller // Robotics and Computer-Integrated Manufacturing. — 2007. — Vol. 23. — P. 170—179.]
- ↑ [ics.khstu.ru/media/2010/N21_14.pdf Змеу К. В., Марков Н. А., Шипитько И. А., Ноткин Б. С. Безмодельное прогнозирующее инверсное нейроуправление с регенерируемым эталонным переходным процессом // Интеллектуальные системы. — 2009. — № 3. — С. 109—117.]
- ↑ [www.kpi.kharkiv.edu/eie/pdf/eie_2008-3.pdf#page=27 Кузнецов Б. И., Василец Т. Е., Варфоломеев А. А. Синтез нейроконтроллера с предсказанием для двухмассовой электромеханической системы //Электротехника и электромеханика. — 2008. — Т. 3. — С. 27 — 32.]
- ↑ [www.immsp.kiev.ua/publications/articles/2011/2011_1/01_2011_Dziuba.pdf Д. А. Дзюба, А. Н. Чернодуб. Применение метода контролируемого возмущения для модификации нейроконтроллеров в реальном времени // Математические Машины и Системы. — 2010. — № 4. — С. 20 — 28. ]
- ↑ [Widrow B., Smith F.W. Pattern-recognizing control systems // Proceedings of Computer and Information Sciences. — Washington, USA — 1964. — Vol. 12. — P. 288—317.]
- ↑ Omidvar O., Elliott D.L. eds. Neural Systems for Control // Academic Press, New York, 1997. — 358 с.
- ↑ Ronco E. Incremental Polynomial Controller Networks: Two Self-Organising Non-Linear Controllers // Ph.D. Disseration Thesis, Glasgow, 1997. — 207 p.
- ↑ 1 2 [Омату С., Халид М., Юсоф Р. Нейроуправление и его приложения: пер. с англ. — М.: ИПРЖР, 2000. — 272 с.]
- ↑ 1 2 [lo.epfl.ch/webdav/site/lo/shared/1988/IEEE_8_17_Apr1988.pdf Psaltis D., Sideris A., Yamamura A.A. A Multilayered Neural Network Controller // IEEE Control Systems Magazine — 1988. — Vol. 8, Issue 2. — P. 17 — 21.]
- ↑ [www.sysc.pdx.edu/classes/Werbos-Backpropagation%20through%20time.pdf Werbos P. Backpropagation through time: what it does and how to do it // Proceedings of the IEEE. — October 1990. — Vol. 78, N. 10. — P. 1550—1560]
- ↑ [Jordan M.I. and Rumelhart D.E. Forwardmodels: Supervised learning with a distal teacher // Cognitive Science — 1990. — Vol. 16. — P. 313—355.]
- ↑ 1 2 [Narendra K.S., Parthasarathy K.K. Identification and control of dynamical systems using neural networks // IEEE Transactions on Neural Networks. — 1990. — N 1. — P. 4 — 27.]
- ↑ [citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.161.9376&rep=rep1&type=pdf Venelinov Topalov, A. Kaynak. Online learning in adaptive neurocontrol schemes with a sliding mode algorithm // IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics. — 2001. — V. 31. — I. 3. — P. 445—450]
- ↑ [www.nbuv.gov.ua/portal/natural/ii/2012/AI_2012_4%5C7/Chernodu.pdf А.Н. Чернодуб. Обучение нейроэмуляторов с использованием псевдорегуляризации для метода нейроуправления с эталонной моделью // Искусственный Интеллект. — 2012. — No. 4. — C. 602—614]
- ↑ 1 2 [cee.uma.pt/morgado/Down/DIAS401.PDF Dias F.M., Mota A.M. Comparison between Different Control Strategies using Neural Networks // 9th Mediterranean Conference on Control and Automation. — Dubrovnik, Croatia, 2001.]
- ↑ [isl-www.stanford.edu/~widrow/papers/c1986adaptiveinverse.pdf Widrow B., Adaptive Inverse Control // Proceedings of the 2nd IFAC Workshop on Adaptive Systems in Control and Signal Processing — Lund, Sweden, July 1986. — P. 1 — 5.]
- ↑ [citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.44.3107&rep=rep1&type=pdf Widrow B., Plett G.L. Adaptive Inverse Control based on Linear and Nonlinear Adaptive Filtering // Proceedings of International Workshop on Neural Networks for Identification, Control, Robotics, and Signal/Image Processing — 21 23 Aug 1996, Venice, Italy. — P. 30 — 38.]
- ↑ 1 2 [hagan.okstate.edu/hagandemuthacc99.pdf Hagan M.T., Demuth H.B. Neural networks for control // Proceedings of the American Control Conference. — San Diego, USA, 1999. — Vol. 3. — P. 1642—1656.]
- ↑ [Rossiter J.A. Model-based Predictive Control: a Practical Approach // CRC Press, 2003. — 318 c.]
- ↑ [Takahashi Y. Adaptive Predictive Control of Nonlinear Time-Varying System using Neural Network // Proceedings of the IEEE International Conference on Neural Networks — Nagoya, Japan, 25 — 29 October, 1993. — Vol. 3. — P. 1464—1468.]
- ↑ [citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.31.2687&rep=rep1&type=pdf Soloway D., Haley P.J. Neural Generalized Predictive Control // Proceedings of the IEEE International Symposium on Intelligent Control. — 15 — 18 September 1996. — P. 277—281.]
- ↑ [citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.49.1270&rep=rep1&type=pdf Prokhorov D. and Wunsch D. Adaptive Critic Designs // IEEE Transactions on Neural Networks. — 1997. — Vol. 8, N 5. — P. 997—1007.]
- ↑ [web.mst.edu/~ganeshv/Implementation_of_Adaptive_Critic_Based_Neurocontrollers_for_Turbogenerators_in_a_Multimachine_Power_System.pdf Venayagamoorthy G.K., Harley R.G., Wunsch D.C. Implementation of Adaptive Critic-based Neurocontrollers for Turbogenerators in a Multimachine Power System", IEEE Transactions on Neural Networks. — 2003. — Vol. 14, Issue 5. — P. 1047—1064.]
- ↑ [www.princeton.edu/~stengel/ADPch3.pdf Ferrari S., Stengel R.F. Model-Based Adaptive Critic Designs // Learning and Approximated Dynamic Programming, J. Si, A. Barto, W. Powell, and D. Wunsch, Eds. New York: Wiley, 2004, Chapter. 3]
- ↑ [www.niisi.ru/iont/projects/rfbr/90197/rvgpdv.pdf Редько В. Г., Прохоров Д. В. Нейросетевые адаптивные критики // VI Всероссийская научно-техническая конференция «Нейроинформатика-2004». Сборник научных трудов. Часть 2. М.: МИФИ, 2004. — C. 77 — 84.]
- ↑ [D’Emilia G., Marrab A., Natalea E. Use of neural networks for quick and accurate auto-tuning of PID controller // Robotics and Computer-Integrated Manufacturing. — 2007. — Vol. 23. — P. 170—179.]
- ↑ [Saiful A., Omatu S. Neuromorphic self-tuning PID controller // Proceedings of IEEE International Conference on Neural Networks, San Francisco, USA, 1993. — P. 552—557.]
Ссылки
- [dspace.nbuv.gov.ua/bitstream/handle/123456789/50964/8_s_79_94.pdf А. Н. Чернодуб, Д. А. Дзюба. Обзор методов нейроуправления // Проблемы программирования. — 2011. — No 2. — С. 79-94.]
- [hagan.okstate.edu/hagandemuthacc99.pdf Hagan M.T., Demuth H.B. Neural networks for control // Proceedings of the American Control Conference. — San Diego, USA, 1999. — Vol. 3. — P. 1642—1656.]
Литература
- Сигеру Омату, Марзуки Халид, Рубия Юсоф. Нейроуправление и его приложения = Neuro-Control and its Applications. — 2-е. — М.: ИПРЖР, 2000. — С. 272. — ISBN ISBN 5-93108-006-6.
- В. А. Терехов, Д. В. Ефимов, И. Ю. Тюкин. Нейросетевые системы управления. — 1-е. — Высшая школа, 2002. — С. 184. — ISBN 5-06-004094-1.
- Хайкин С. Нейронные сети: полный курс = Neural Networks: A Comprehensive Foundation. — 2-е. — М.: «Вильямс», 2006. — С. 1104. — ISBN 0-13-273350-1.
- Omidvar O., Elliott D.L. eds. Neural Systems for Control. — New York: Academic Press, 1997. — С. 358. — ISBN 0-12-526430-5.
Отрывок, характеризующий Нейроуправление
– Что? что? – спросила Наташа.– Это то, то, вот… – сказала Соня с бледным лицом и дрожащими губами.
Наташа тихо затворила дверь и отошла с Соней к окну, не понимая еще того, что ей говорили.
– Помнишь ты, – с испуганным и торжественным лицом говорила Соня, – помнишь, когда я за тебя в зеркало смотрела… В Отрадном, на святках… Помнишь, что я видела?..
– Да, да! – широко раскрывая глаза, сказала Наташа, смутно вспоминая, что тогда Соня сказала что то о князе Андрее, которого она видела лежащим.
– Помнишь? – продолжала Соня. – Я видела тогда и сказала всем, и тебе, и Дуняше. Я видела, что он лежит на постели, – говорила она, при каждой подробности делая жест рукою с поднятым пальцем, – и что он закрыл глаза, и что он покрыт именно розовым одеялом, и что он сложил руки, – говорила Соня, убеждаясь, по мере того как она описывала виденные ею сейчас подробности, что эти самые подробности она видела тогда. Тогда она ничего не видела, но рассказала, что видела то, что ей пришло в голову; но то, что она придумала тогда, представлялось ей столь же действительным, как и всякое другое воспоминание. То, что она тогда сказала, что он оглянулся на нее и улыбнулся и был покрыт чем то красным, она не только помнила, но твердо была убеждена, что еще тогда она сказала и видела, что он был покрыт розовым, именно розовым одеялом, и что глаза его были закрыты.
– Да, да, именно розовым, – сказала Наташа, которая тоже теперь, казалось, помнила, что было сказано розовым, и в этом самом видела главную необычайность и таинственность предсказания.
– Но что же это значит? – задумчиво сказала Наташа.
– Ах, я не знаю, как все это необычайно! – сказала Соня, хватаясь за голову.
Через несколько минут князь Андрей позвонил, и Наташа вошла к нему; а Соня, испытывая редко испытанное ею волнение и умиление, осталась у окна, обдумывая всю необычайность случившегося.
В этот день был случай отправить письма в армию, и графиня писала письмо сыну.
– Соня, – сказала графиня, поднимая голову от письма, когда племянница проходила мимо нее. – Соня, ты не напишешь Николеньке? – сказала графиня тихим, дрогнувшим голосом, и во взгляде ее усталых, смотревших через очки глаз Соня прочла все, что разумела графиня этими словами. В этом взгляде выражались и мольба, и страх отказа, и стыд за то, что надо было просить, и готовность на непримиримую ненависть в случае отказа.
Соня подошла к графине и, став на колени, поцеловала ее руку.
– Я напишу, maman, – сказала она.
Соня была размягчена, взволнована и умилена всем тем, что происходило в этот день, в особенности тем таинственным совершением гаданья, которое она сейчас видела. Теперь, когда она знала, что по случаю возобновления отношений Наташи с князем Андреем Николай не мог жениться на княжне Марье, она с радостью почувствовала возвращение того настроения самопожертвования, в котором она любила и привыкла жить. И со слезами на глазах и с радостью сознания совершения великодушного поступка она, несколько раз прерываясь от слез, которые отуманивали ее бархатные черные глаза, написала то трогательное письмо, получение которого так поразило Николая.
На гауптвахте, куда был отведен Пьер, офицер и солдаты, взявшие его, обращались с ним враждебно, но вместе с тем и уважительно. Еще чувствовалось в их отношении к нему и сомнение о том, кто он такой (не очень ли важный человек), и враждебность вследствие еще свежей их личной борьбы с ним.
Но когда, в утро другого дня, пришла смена, то Пьер почувствовал, что для нового караула – для офицеров и солдат – он уже не имел того смысла, который имел для тех, которые его взяли. И действительно, в этом большом, толстом человеке в мужицком кафтане караульные другого дня уже не видели того живого человека, который так отчаянно дрался с мародером и с конвойными солдатами и сказал торжественную фразу о спасении ребенка, а видели только семнадцатого из содержащихся зачем то, по приказанию высшего начальства, взятых русских. Ежели и было что нибудь особенное в Пьере, то только его неробкий, сосредоточенно задумчивый вид и французский язык, на котором он, удивительно для французов, хорошо изъяснялся. Несмотря на то, в тот же день Пьера соединили с другими взятыми подозрительными, так как отдельная комната, которую он занимал, понадобилась офицеру.
Все русские, содержавшиеся с Пьером, были люди самого низкого звания. И все они, узнав в Пьере барина, чуждались его, тем более что он говорил по французски. Пьер с грустью слышал над собою насмешки.
На другой день вечером Пьер узнал, что все эти содержащиеся (и, вероятно, он в том же числе) должны были быть судимы за поджигательство. На третий день Пьера водили с другими в какой то дом, где сидели французский генерал с белыми усами, два полковника и другие французы с шарфами на руках. Пьеру, наравне с другими, делали с той, мнимо превышающею человеческие слабости, точностью и определительностью, с которой обыкновенно обращаются с подсудимыми, вопросы о том, кто он? где он был? с какою целью? и т. п.
Вопросы эти, оставляя в стороне сущность жизненного дела и исключая возможность раскрытия этой сущности, как и все вопросы, делаемые на судах, имели целью только подставление того желобка, по которому судящие желали, чтобы потекли ответы подсудимого и привели его к желаемой цели, то есть к обвинению. Как только он начинал говорить что нибудь такое, что не удовлетворяло цели обвинения, так принимали желобок, и вода могла течь куда ей угодно. Кроме того, Пьер испытал то же, что во всех судах испытывает подсудимый: недоумение, для чего делали ему все эти вопросы. Ему чувствовалось, что только из снисходительности или как бы из учтивости употреблялась эта уловка подставляемого желобка. Он знал, что находился во власти этих людей, что только власть привела его сюда, что только власть давала им право требовать ответы на вопросы, что единственная цель этого собрания состояла в том, чтоб обвинить его. И поэтому, так как была власть и было желание обвинить, то не нужно было и уловки вопросов и суда. Очевидно было, что все ответы должны были привести к виновности. На вопрос, что он делал, когда его взяли, Пьер отвечал с некоторою трагичностью, что он нес к родителям ребенка, qu'il avait sauve des flammes [которого он спас из пламени]. – Для чего он дрался с мародером? Пьер отвечал, что он защищал женщину, что защита оскорбляемой женщины есть обязанность каждого человека, что… Его остановили: это не шло к делу. Для чего он был на дворе загоревшегося дома, на котором его видели свидетели? Он отвечал, что шел посмотреть, что делалось в Москве. Его опять остановили: у него не спрашивали, куда он шел, а для чего он находился подле пожара? Кто он? повторили ему первый вопрос, на который он сказал, что не хочет отвечать. Опять он отвечал, что не может сказать этого.
– Запишите, это нехорошо. Очень нехорошо, – строго сказал ему генерал с белыми усами и красным, румяным лицом.
На четвертый день пожары начались на Зубовском валу.
Пьера с тринадцатью другими отвели на Крымский Брод, в каретный сарай купеческого дома. Проходя по улицам, Пьер задыхался от дыма, который, казалось, стоял над всем городом. С разных сторон виднелись пожары. Пьер тогда еще не понимал значения сожженной Москвы и с ужасом смотрел на эти пожары.
В каретном сарае одного дома у Крымского Брода Пьер пробыл еще четыре дня и во время этих дней из разговора французских солдат узнал, что все содержащиеся здесь ожидали с каждым днем решения маршала. Какого маршала, Пьер не мог узнать от солдат. Для солдата, очевидно, маршал представлялся высшим и несколько таинственным звеном власти.
Эти первые дни, до 8 го сентября, – дня, в который пленных повели на вторичный допрос, были самые тяжелые для Пьера.
Х
8 го сентября в сарай к пленным вошел очень важный офицер, судя по почтительности, с которой с ним обращались караульные. Офицер этот, вероятно, штабный, с списком в руках, сделал перекличку всем русским, назвав Пьера: celui qui n'avoue pas son nom [тот, который не говорит своего имени]. И, равнодушно и лениво оглядев всех пленных, он приказал караульному офицеру прилично одеть и прибрать их, прежде чем вести к маршалу. Через час прибыла рота солдат, и Пьера с другими тринадцатью повели на Девичье поле. День был ясный, солнечный после дождя, и воздух был необыкновенно чист. Дым не стлался низом, как в тот день, когда Пьера вывели из гауптвахты Зубовского вала; дым поднимался столбами в чистом воздухе. Огня пожаров нигде не было видно, но со всех сторон поднимались столбы дыма, и вся Москва, все, что только мог видеть Пьер, было одно пожарище. Со всех сторон виднелись пустыри с печами и трубами и изредка обгорелые стены каменных домов. Пьер приглядывался к пожарищам и не узнавал знакомых кварталов города. Кое где виднелись уцелевшие церкви. Кремль, неразрушенный, белел издалека с своими башнями и Иваном Великим. Вблизи весело блестел купол Ново Девичьего монастыря, и особенно звонко слышался оттуда благовест. Благовест этот напомнил Пьеру, что было воскресенье и праздник рождества богородицы. Но казалось, некому было праздновать этот праздник: везде было разоренье пожарища, и из русского народа встречались только изредка оборванные, испуганные люди, которые прятались при виде французов.
Очевидно, русское гнездо было разорено и уничтожено; но за уничтожением этого русского порядка жизни Пьер бессознательно чувствовал, что над этим разоренным гнездом установился свой, совсем другой, но твердый французский порядок. Он чувствовал это по виду тех, бодро и весело, правильными рядами шедших солдат, которые конвоировали его с другими преступниками; он чувствовал это по виду какого то важного французского чиновника в парной коляске, управляемой солдатом, проехавшего ему навстречу. Он это чувствовал по веселым звукам полковой музыки, доносившимся с левой стороны поля, и в особенности он чувствовал и понимал это по тому списку, который, перекликая пленных, прочел нынче утром приезжавший французский офицер. Пьер был взят одними солдатами, отведен в одно, в другое место с десятками других людей; казалось, они могли бы забыть про него, смешать его с другими. Но нет: ответы его, данные на допросе, вернулись к нему в форме наименования его: celui qui n'avoue pas son nom. И под этим названием, которое страшно было Пьеру, его теперь вели куда то, с несомненной уверенностью, написанною на их лицах, что все остальные пленные и он были те самые, которых нужно, и что их ведут туда, куда нужно. Пьер чувствовал себя ничтожной щепкой, попавшей в колеса неизвестной ему, но правильно действующей машины.
Пьера с другими преступниками привели на правую сторону Девичьего поля, недалеко от монастыря, к большому белому дому с огромным садом. Это был дом князя Щербатова, в котором Пьер часто прежде бывал у хозяина и в котором теперь, как он узнал из разговора солдат, стоял маршал, герцог Экмюльский.
Их подвели к крыльцу и по одному стали вводить в дом. Пьера ввели шестым. Через стеклянную галерею, сени, переднюю, знакомые Пьеру, его ввели в длинный низкий кабинет, у дверей которого стоял адъютант.
Даву сидел на конце комнаты над столом, с очками на носу. Пьер близко подошел к нему. Даву, не поднимая глаз, видимо справлялся с какой то бумагой, лежавшей перед ним. Не поднимая же глаз, он тихо спросил:
– Qui etes vous? [Кто вы такой?]
Пьер молчал оттого, что не в силах был выговорить слова. Даву для Пьера не был просто французский генерал; для Пьера Даву был известный своей жестокостью человек. Глядя на холодное лицо Даву, который, как строгий учитель, соглашался до времени иметь терпение и ждать ответа, Пьер чувствовал, что всякая секунда промедления могла стоить ему жизни; но он не знал, что сказать. Сказать то же, что он говорил на первом допросе, он не решался; открыть свое звание и положение было и опасно и стыдно. Пьер молчал. Но прежде чем Пьер успел на что нибудь решиться, Даву приподнял голову, приподнял очки на лоб, прищурил глаза и пристально посмотрел на Пьера.
– Я знаю этого человека, – мерным, холодным голосом, очевидно рассчитанным для того, чтобы испугать Пьера, сказал он. Холод, пробежавший прежде по спине Пьера, охватил его голову, как тисками.
– Mon general, vous ne pouvez pas me connaitre, je ne vous ai jamais vu… [Вы не могли меня знать, генерал, я никогда не видал вас.]
– C'est un espion russe, [Это русский шпион,] – перебил его Даву, обращаясь к другому генералу, бывшему в комнате и которого не заметил Пьер. И Даву отвернулся. С неожиданным раскатом в голосе Пьер вдруг быстро заговорил.
– Non, Monseigneur, – сказал он, неожиданно вспомнив, что Даву был герцог. – Non, Monseigneur, vous n'avez pas pu me connaitre. Je suis un officier militionnaire et je n'ai pas quitte Moscou. [Нет, ваше высочество… Нет, ваше высочество, вы не могли меня знать. Я офицер милиции, и я не выезжал из Москвы.]
– Votre nom? [Ваше имя?] – повторил Даву.
– Besouhof. [Безухов.]
– Qu'est ce qui me prouvera que vous ne mentez pas? [Кто мне докажет, что вы не лжете?]
– Monseigneur! [Ваше высочество!] – вскрикнул Пьер не обиженным, но умоляющим голосом.
Даву поднял глаза и пристально посмотрел на Пьера. Несколько секунд они смотрели друг на друга, и этот взгляд спас Пьера. В этом взгляде, помимо всех условий войны и суда, между этими двумя людьми установились человеческие отношения. Оба они в эту одну минуту смутно перечувствовали бесчисленное количество вещей и поняли, что они оба дети человечества, что они братья.
В первом взгляде для Даву, приподнявшего только голову от своего списка, где людские дела и жизнь назывались нумерами, Пьер был только обстоятельство; и, не взяв на совесть дурного поступка, Даву застрелил бы его; но теперь уже он видел в нем человека. Он задумался на мгновение.
– Comment me prouverez vous la verite de ce que vous me dites? [Чем вы докажете мне справедливость ваших слов?] – сказал Даву холодно.
Пьер вспомнил Рамбаля и назвал его полк, и фамилию, и улицу, на которой был дом.
– Vous n'etes pas ce que vous dites, [Вы не то, что вы говорите.] – опять сказал Даву.
Пьер дрожащим, прерывающимся голосом стал приводить доказательства справедливости своего показания.
Но в это время вошел адъютант и что то доложил Даву.
Даву вдруг просиял при известии, сообщенном адъютантом, и стал застегиваться. Он, видимо, совсем забыл о Пьере.
Когда адъютант напомнил ему о пленном, он, нахмурившись, кивнул в сторону Пьера и сказал, чтобы его вели. Но куда должны были его вести – Пьер не знал: назад в балаган или на приготовленное место казни, которое, проходя по Девичьему полю, ему показывали товарищи.
Он обернул голову и видел, что адъютант переспрашивал что то.
– Oui, sans doute! [Да, разумеется!] – сказал Даву, но что «да», Пьер не знал.
Пьер не помнил, как, долго ли он шел и куда. Он, в состоянии совершенного бессмыслия и отупления, ничего не видя вокруг себя, передвигал ногами вместе с другими до тех пор, пока все остановились, и он остановился. Одна мысль за все это время была в голове Пьера. Это была мысль о том: кто, кто же, наконец, приговорил его к казни. Это были не те люди, которые допрашивали его в комиссии: из них ни один не хотел и, очевидно, не мог этого сделать. Это был не Даву, который так человечески посмотрел на него. Еще бы одна минута, и Даву понял бы, что они делают дурно, но этой минуте помешал адъютант, который вошел. И адъютант этот, очевидно, не хотел ничего худого, но он мог бы не войти. Кто же это, наконец, казнил, убивал, лишал жизни его – Пьера со всеми его воспоминаниями, стремлениями, надеждами, мыслями? Кто делал это? И Пьер чувствовал, что это был никто.
Это был порядок, склад обстоятельств.
Порядок какой то убивал его – Пьера, лишал его жизни, всего, уничтожал его.
От дома князя Щербатова пленных повели прямо вниз по Девичьему полю, левее Девичьего монастыря и подвели к огороду, на котором стоял столб. За столбом была вырыта большая яма с свежевыкопанной землей, и около ямы и столба полукругом стояла большая толпа народа. Толпа состояла из малого числа русских и большого числа наполеоновских войск вне строя: немцев, итальянцев и французов в разнородных мундирах. Справа и слева столба стояли фронты французских войск в синих мундирах с красными эполетами, в штиблетах и киверах.
Преступников расставили по известному порядку, который был в списке (Пьер стоял шестым), и подвели к столбу. Несколько барабанов вдруг ударили с двух сторон, и Пьер почувствовал, что с этим звуком как будто оторвалась часть его души. Он потерял способность думать и соображать. Он только мог видеть и слышать. И только одно желание было у него – желание, чтобы поскорее сделалось что то страшное, что должно было быть сделано. Пьер оглядывался на своих товарищей и рассматривал их.
Два человека с края были бритые острожные. Один высокий, худой; другой черный, мохнатый, мускулистый, с приплюснутым носом. Третий был дворовый, лет сорока пяти, с седеющими волосами и полным, хорошо откормленным телом. Четвертый был мужик, очень красивый, с окладистой русой бородой и черными глазами. Пятый был фабричный, желтый, худой малый, лет восемнадцати, в халате.
Пьер слышал, что французы совещались, как стрелять – по одному или по два? «По два», – холодно спокойно отвечал старший офицер. Сделалось передвижение в рядах солдат, и заметно было, что все торопились, – и торопились не так, как торопятся, чтобы сделать понятное для всех дело, но так, как торопятся, чтобы окончить необходимое, но неприятное и непостижимое дело.
Чиновник француз в шарфе подошел к правой стороне шеренги преступников в прочел по русски и по французски приговор.
Потом две пары французов подошли к преступникам и взяли, по указанию офицера, двух острожных, стоявших с края. Острожные, подойдя к столбу, остановились и, пока принесли мешки, молча смотрели вокруг себя, как смотрит подбитый зверь на подходящего охотника. Один все крестился, другой чесал спину и делал губами движение, подобное улыбке. Солдаты, торопясь руками, стали завязывать им глаза, надевать мешки и привязывать к столбу.
Двенадцать человек стрелков с ружьями мерным, твердым шагом вышли из за рядов и остановились в восьми шагах от столба. Пьер отвернулся, чтобы не видать того, что будет. Вдруг послышался треск и грохот, показавшиеся Пьеру громче самых страшных ударов грома, и он оглянулся. Был дым, и французы с бледными лицами и дрожащими руками что то делали у ямы. Повели других двух. Так же, такими же глазами и эти двое смотрели на всех, тщетно, одними глазами, молча, прося защиты и, видимо, не понимая и не веря тому, что будет. Они не могли верить, потому что они одни знали, что такое была для них их жизнь, и потому не понимали и не верили, чтобы можно было отнять ее.
Пьер хотел не смотреть и опять отвернулся; но опять как будто ужасный взрыв поразил его слух, и вместе с этими звуками он увидал дым, чью то кровь и бледные испуганные лица французов, опять что то делавших у столба, дрожащими руками толкая друг друга. Пьер, тяжело дыша, оглядывался вокруг себя, как будто спрашивая: что это такое? Тот же вопрос был и во всех взглядах, которые встречались со взглядом Пьера.
На всех лицах русских, на лицах французских солдат, офицеров, всех без исключения, он читал такой же испуг, ужас и борьбу, какие были в его сердце. «Да кто жо это делает наконец? Они все страдают так же, как и я. Кто же? Кто же?» – на секунду блеснуло в душе Пьера.
– Tirailleurs du 86 me, en avant! [Стрелки 86 го, вперед!] – прокричал кто то. Повели пятого, стоявшего рядом с Пьером, – одного. Пьер не понял того, что он спасен, что он и все остальные были приведены сюда только для присутствия при казни. Он со все возраставшим ужасом, не ощущая ни радости, ни успокоения, смотрел на то, что делалось. Пятый был фабричный в халате. Только что до него дотронулись, как он в ужасе отпрыгнул и схватился за Пьера (Пьер вздрогнул и оторвался от него). Фабричный не мог идти. Его тащили под мышки, и он что то кричал. Когда его подвели к столбу, он вдруг замолк. Он как будто вдруг что то понял. То ли он понял, что напрасно кричать, или то, что невозможно, чтобы его убили люди, но он стал у столба, ожидая повязки вместе с другими и, как подстреленный зверь, оглядываясь вокруг себя блестящими глазами.
Пьер уже не мог взять на себя отвернуться и закрыть глаза. Любопытство и волнение его и всей толпы при этом пятом убийстве дошло до высшей степени. Так же как и другие, этот пятый казался спокоен: он запахивал халат и почесывал одной босой ногой о другую.
Когда ему стали завязывать глаза, он поправил сам узел на затылке, который резал ему; потом, когда прислонили его к окровавленному столбу, он завалился назад, и, так как ему в этом положении было неловко, он поправился и, ровно поставив ноги, покойно прислонился. Пьер не сводил с него глаз, не упуская ни малейшего движения.
Должно быть, послышалась команда, должно быть, после команды раздались выстрелы восьми ружей. Но Пьер, сколько он ни старался вспомнить потом, не слыхал ни малейшего звука от выстрелов. Он видел только, как почему то вдруг опустился на веревках фабричный, как показалась кровь в двух местах и как самые веревки, от тяжести повисшего тела, распустились и фабричный, неестественно опустив голову и подвернув ногу, сел. Пьер подбежал к столбу. Никто не удерживал его. Вокруг фабричного что то делали испуганные, бледные люди. У одного старого усатого француза тряслась нижняя челюсть, когда он отвязывал веревки. Тело спустилось. Солдаты неловко и торопливо потащили его за столб и стали сталкивать в яму.
Все, очевидно, несомненно знали, что они были преступники, которым надо было скорее скрыть следы своего преступления.
Пьер заглянул в яму и увидел, что фабричный лежал там коленами кверху, близко к голове, одно плечо выше другого. И это плечо судорожно, равномерно опускалось и поднималось. Но уже лопатины земли сыпались на все тело. Один из солдат сердито, злобно и болезненно крикнул на Пьера, чтобы он вернулся. Но Пьер не понял его и стоял у столба, и никто не отгонял его.
Когда уже яма была вся засыпана, послышалась команда. Пьера отвели на его место, и французские войска, стоявшие фронтами по обеим сторонам столба, сделали полуоборот и стали проходить мерным шагом мимо столба. Двадцать четыре человека стрелков с разряженными ружьями, стоявшие в середине круга, примыкали бегом к своим местам, в то время как роты проходили мимо них.
Пьер смотрел теперь бессмысленными глазами на этих стрелков, которые попарно выбегали из круга. Все, кроме одного, присоединились к ротам. Молодой солдат с мертво бледным лицом, в кивере, свалившемся назад, спустив ружье, все еще стоял против ямы на том месте, с которого он стрелял. Он, как пьяный, шатался, делая то вперед, то назад несколько шагов, чтобы поддержать свое падающее тело. Старый солдат, унтер офицер, выбежал из рядов и, схватив за плечо молодого солдата, втащил его в роту. Толпа русских и французов стала расходиться. Все шли молча, с опущенными головами.
– Ca leur apprendra a incendier, [Это их научит поджигать.] – сказал кто то из французов. Пьер оглянулся на говорившего и увидал, что это был солдат, который хотел утешиться чем нибудь в том, что было сделано, но не мог. Не договорив начатого, он махнул рукою и пошел прочь.
После казни Пьера отделили от других подсудимых и оставили одного в небольшой, разоренной и загаженной церкви.
Перед вечером караульный унтер офицер с двумя солдатами вошел в церковь и объявил Пьеру, что он прощен и поступает теперь в бараки военнопленных. Не понимая того, что ему говорили, Пьер встал и пошел с солдатами. Его привели к построенным вверху поля из обгорелых досок, бревен и тесу балаганам и ввели в один из них. В темноте человек двадцать различных людей окружили Пьера. Пьер смотрел на них, не понимая, кто такие эти люди, зачем они и чего хотят от него. Он слышал слова, которые ему говорили, но не делал из них никакого вывода и приложения: не понимал их значения. Он сам отвечал на то, что у него спрашивали, но не соображал того, кто слушает его и как поймут его ответы. Он смотрел на лица и фигуры, и все они казались ему одинаково бессмысленны.
С той минуты, как Пьер увидал это страшное убийство, совершенное людьми, не хотевшими этого делать, в душе его как будто вдруг выдернута была та пружина, на которой все держалось и представлялось живым, и все завалилось в кучу бессмысленного сора. В нем, хотя он и не отдавал себе отчета, уничтожилась вера и в благоустройство мира, и в человеческую, и в свою душу, и в бога. Это состояние было испытываемо Пьером прежде, но никогда с такою силой, как теперь. Прежде, когда на Пьера находили такого рода сомнения, – сомнения эти имели источником собственную вину. И в самой глубине души Пьер тогда чувствовал, что от того отчаяния и тех сомнений было спасение в самом себе. Но теперь он чувствовал, что не его вина была причиной того, что мир завалился в его глазах и остались одни бессмысленные развалины. Он чувствовал, что возвратиться к вере в жизнь – не в его власти.
Вокруг него в темноте стояли люди: верно, что то их очень занимало в нем. Ему рассказывали что то, расспрашивали о чем то, потом повели куда то, и он, наконец, очутился в углу балагана рядом с какими то людьми, переговаривавшимися с разных сторон, смеявшимися.
– И вот, братцы мои… тот самый принц, который (с особенным ударением на слове который)… – говорил чей то голос в противуположном углу балагана.
Молча и неподвижно сидя у стены на соломе, Пьер то открывал, то закрывал глаза. Но только что он закрывал глаза, он видел пред собой то же страшное, в особенности страшное своей простотой, лицо фабричного и еще более страшные своим беспокойством лица невольных убийц. И он опять открывал глаза и бессмысленно смотрел в темноте вокруг себя.
Рядом с ним сидел, согнувшись, какой то маленький человек, присутствие которого Пьер заметил сначала по крепкому запаху пота, который отделялся от него при всяком его движении. Человек этот что то делал в темноте с своими ногами, и, несмотря на то, что Пьер не видал его лица, он чувствовал, что человек этот беспрестанно взглядывал на него. Присмотревшись в темноте, Пьер понял, что человек этот разувался. И то, каким образом он это делал, заинтересовало Пьера.
Размотав бечевки, которыми была завязана одна нога, он аккуратно свернул бечевки и тотчас принялся за другую ногу, взглядывая на Пьера. Пока одна рука вешала бечевку, другая уже принималась разматывать другую ногу. Таким образом аккуратно, круглыми, спорыми, без замедления следовавшими одно за другим движеньями, разувшись, человек развесил свою обувь на колышки, вбитые у него над головами, достал ножик, обрезал что то, сложил ножик, положил под изголовье и, получше усевшись, обнял свои поднятые колени обеими руками и прямо уставился на Пьера. Пьеру чувствовалось что то приятное, успокоительное и круглое в этих спорых движениях, в этом благоустроенном в углу его хозяйстве, в запахе даже этого человека, и он, не спуская глаз, смотрел на него.
– А много вы нужды увидали, барин? А? – сказал вдруг маленький человек. И такое выражение ласки и простоты было в певучем голосе человека, что Пьер хотел отвечать, но у него задрожала челюсть, и он почувствовал слезы. Маленький человек в ту же секунду, не давая Пьеру времени выказать свое смущение, заговорил тем же приятным голосом.
– Э, соколик, не тужи, – сказал он с той нежно певучей лаской, с которой говорят старые русские бабы. – Не тужи, дружок: час терпеть, а век жить! Вот так то, милый мой. А живем тут, слава богу, обиды нет. Тоже люди и худые и добрые есть, – сказал он и, еще говоря, гибким движением перегнулся на колени, встал и, прокашливаясь, пошел куда то.
– Ишь, шельма, пришла! – услыхал Пьер в конце балагана тот же ласковый голос. – Пришла шельма, помнит! Ну, ну, буде. – И солдат, отталкивая от себя собачонку, прыгавшую к нему, вернулся к своему месту и сел. В руках у него было что то завернуто в тряпке.
– Вот, покушайте, барин, – сказал он, опять возвращаясь к прежнему почтительному тону и развертывая и подавая Пьеру несколько печеных картошек. – В обеде похлебка была. А картошки важнеющие!
Пьер не ел целый день, и запах картофеля показался ему необыкновенно приятным. Он поблагодарил солдата и стал есть.
– Что ж, так то? – улыбаясь, сказал солдат и взял одну из картошек. – А ты вот как. – Он достал опять складной ножик, разрезал на своей ладони картошку на равные две половины, посыпал соли из тряпки и поднес Пьеру.
– Картошки важнеющие, – повторил он. – Ты покушай вот так то.
Пьеру казалось, что он никогда не ел кушанья вкуснее этого.
– Нет, мне все ничего, – сказал Пьер, – но за что они расстреляли этих несчастных!.. Последний лет двадцати.
– Тц, тц… – сказал маленький человек. – Греха то, греха то… – быстро прибавил он, и, как будто слова его всегда были готовы во рту его и нечаянно вылетали из него, он продолжал: – Что ж это, барин, вы так в Москве то остались?
– Я не думал, что они так скоро придут. Я нечаянно остался, – сказал Пьер.
– Да как же они взяли тебя, соколик, из дома твоего?
– Нет, я пошел на пожар, и тут они схватили меня, судили за поджигателя.
– Где суд, там и неправда, – вставил маленький человек.
– А ты давно здесь? – спросил Пьер, дожевывая последнюю картошку.
– Я то? В то воскресенье меня взяли из гошпиталя в Москве.
– Ты кто же, солдат?
– Солдаты Апшеронского полка. От лихорадки умирал. Нам и не сказали ничего. Наших человек двадцать лежало. И не думали, не гадали.
